As mentioned at the end of the last section, an agent-based approach to travel behavior simulations leads to a large number of heterogeneous modules that need to coexist in a joint simulation environment. This raises many questions about computational implementation, such as:
Computing in the area of transportation deals with entities which are
plausibly encoded as objects. Examples are travelers, traffic
lights, but also links (![]() roads) and nodes (
roads) and nodes (![]() intersections).
This suggests the use of object-oriented programming languages, such
as C++ or Java.
intersections).
This suggests the use of object-oriented programming languages, such
as C++ or Java.
An important issue with the use of object-oriented programming languages is the use of inheritance. It is straightforward to start out by just having different computational classes for different classes of objects, for example for travelers, traffic lights, links, nodes, etc. However, eventually one will notice that those different classes share some similar properties. For example, they all have a unique identification tag ID, and it gets tiresome to reprogram the mechanics for this anew every time a new class is started. This implies that there should be a class SimulationObject that knows how to deal with ID tags. In C++, this could look as follows:1
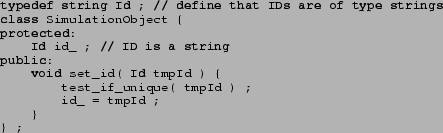
This could be used via

A traveler class could then inherit that functionality:
![]()
and without any further ado one could program

This becomes of particular importance if one needs different representations of the same entities for different purposes. For example, a link inside a simulation needs to be able to have a traffic dynamics executed on top of it, which implies that it needs some representation of road space. In contrast, a link inside a shortest-path computation will not need any of this, but it may need to be aware of time-dependent link travel times. The same is true if one wants to experiment with different models: Some behavioral model of a traveler may need the age of the traveler, while some other behavioral model may be interested in driver license ownership.
To a certain extent, it is possible to live with classes that are just supersets of all these properties. For example, if a traveler class already exists and contains an age variable, then driver_license_ownership could just be added. There are however cases where just adding variables causes too heavy burdens on computer memory consumption, such as when two researchers want to experiment with different mental memory models inside a traveler object. In such a case, both researchers can agree to use the same base class, which provides basic functionality including, for example, reading demographic properties from file, but then both researchers inherit from this base class to have their own extensions. C++ allows multiple inheritance so that class Traveler can be both a SimulationObject and a DatabaseObject for example. Java allows only single inheritance.
Another useful property of modern programming languages is that increasingly advanced data structures are available. The arguably most important data structures for the purpose of travel behavior simulation are the container classes, which contain and maintain collections of objects. For example, all travelers can be stored in a single vector or list container. These container classes take care of memory allocation, that is, one does not have to know ahead of time how many elements the container will maximally contain. An important functionality of container classes are so-called iterators, which allow to go through all objects in a container in a systematic way without having to worry about array boundaries or memory faults.
In C++ , these classes are supplied by the so-called Standard Template Library (STL). They are now included by default in most modern C++ compilers and do not need any additional compiler switches any more. In Java, the container classes and related algorithms known as the Collections Framework have been around since the 1.2 release. The main difference between the C++ and the Java implementation of container classes is type safety: in C++ the compiler checks that objects from different types are not mixed up in a given container. In Java, object types are only checked during run time so that potential errors might still subsist in the code. The elaborated handling of exceptions in Java often allows the developer to track these errors in the early stage of development. Nevertheless, developers have since long recognized the advantage of generic programming offered by C++ templates. For this reason, a similar feature called Generics is going to be included in the next release (1.5) of Java (developer.java.sun.com/developer/technicalArticles/releases/generics/, accessed 2003).
Some languages, notably Java, offer garbage collection, while some other languages, notably C++, do not offer it in their standard implementation. Garbage collection refers to a process that reclaims dynamically allocated but no longer needed memory during program execution. With multi-agent code, this could for example refer to an agent's plan which is no longer needed. A sophisticated implementation would explicitely put the previously needed memory into some pool of available free memory; but a less sophisticated or faulty implementation may forget this and for example just delete the pointer (i.e. the reference) to the memory location. Garbage collection in regular intervals goes through the memory and checks for areas to which no reference exists. Such memory areas are then moved into the pool of available free memory.
In multi-agent simulation code, in contrast to the typical numerical analysis application in FORTRAN for instance, objects are constantly created and destroyed because of the dynamic nature of the underlying model. Therefore, garbage collection and the absence of pointer arithmetics reduces by a large amount the debugging process since memory allocation bugs are the most frequent coding errors. However, garbage collection is usually slower, even though it can run in a parallel thread which helps on a multi-CPU machine.
Some researchers in travel behavior research use the Swarm (www.swarm.org, accessed 2003) library. A similar but newer approach is RePast (repast.sourcefourge.net, accessed 2003). An advantage of RePast when compared to Swarm is that it is based on a wide-spread programming language (Java), in contrast to Swarm which is based on Objective C. Both approaches, and probably many others, provide library support to program systems which are composed of many agents or small software entities. The arguably most important element of support is the spatial substrate (e.g. cells, graphs, different types of boundary conditions). The provided functions include moving agents, checking for the presence of other agents, and, importantly, graphical output. In addition, the systems provides a mechanism to change parameters while the program is running (rather than having to edit some configuration file, or to re-compile the code). Support for data output and graphs is included.
Our own experience with these systems is that they are extremely useful in the prototyping of new models but potentially slow. This is certainly true when graphics is switched on, but it is probably still true when it is switched off. The reasons are that RePast uses a very nice object-oriented design that sometimes makes compromises with respect to computational performances and also that Java (the basis for RePast) is usually somewhat inferior to C++ in term of computational speed.
An issue with object-oriented programming is code readability and maintainability. It is often claimed that object-oriented code is easier to maintain than other code. This is not consistent with our own experiences, and this statement is valid in spite of documentation support systems such as javadoc (java.sun.com/j2se/javadoc, accessed 2003) or doxygen (www.doxygen.org, accessed 2003). In particular, newcomers to an object-oriented code need to possess considerable language knowledge and experience in order to do meaningful changes. It is maybe more correct to say that object-oriented programming helps a programmer who is very fluent and experienced both in the concepts and in the technical details, and who works with a given code over a long period of time. It does however not necessarily help a project which is maintained by less experienced programmers, or when programmers change often, or when there is a big difference in object-oriented design preferences from one programmer to the next. It seems to us that only consistent teaching, which develops norms for ``building'' programs (in the same way as there are norms for planning and building bridges), will in the long run improve the situation.
Yet another issue contains portability. At this point, the only nearly completely portable language is Java, and it is portable even with graphics. One can only hope that Microsoft will continue to support a completely standard-conforming Java.
Regarding C++, as long as code is written without any graphical items such as user interfaces or graphical display of results, it is in principle possible to keep it portable between Unix, Windows, and Mac. (Since Mac OS-X is a Unix-based system, portability of Unix-based codes to and from Mac OS-X has become rather straightforward.) Nevertheless, our experience is that porting C++ code from Linux to Windows, even when it was written with portability in mind, takes several days, and the result is not entirely satisfying, since Unix uses Makefiles while Windows uses ``projects'' to organize large projects.
If one wants to deliver a Windows executable only, then the Cygwin (www.cygwin.com, accessed 2003) development environment may be a solution. The cygwin library comes as a Windows DLL (Dynamically Loaded Library) that wraps most of the standard Unix system calls and uses Windows system calls instead. The Cygwin development environment offers exactly the same tools as a Unix platform (bash, make, libc, gcc, g++, STL), but it does not provide an easy solution when someone wants to deliver a library or code that can be imported into a Windows IDE (Integrated Development Environment). Moreover, code that is sensible to the operating system layer will not be ported easily (e.g. socket I/O).
Common belief is that Java is considerably slower than C or C++. At least in the area of multi-agent traffic simulations, this is not consistent with our own observations. We have taught a class on multi-agent transportation simulations several times, which consisted of programming a simple traffic micro-simulation, a time-dependent fastest-path router, and a simple departure time choice model. With about half of the students programming in C++ and another half programming in Java, we rarely found important differences in terms of computational performance between the groups. The main differences that we have found are:
All the strategic parts of a travel behavior simulation are concerned with search: Finding links that combine to a good route; finding activity locations that suit individual preferences and constraints; finding good activity times; finding a residential location; etc. And many areas in computer science are indeed concerned with search. This reaches from purely engineering issues (``how to find a file on a hard disk'') via operations research (e.g. traveling salesman problem) to cognitive modeling and Artificial Intelligence.
For travel behavior research, it is important to know these methods, since many models in travel behavior research essentially lead to search problems that cannot be solved within reasonable time on existing or future computers. Take nested logit models, which can be visualized as a decision tree. For example, one can phrase activity-based demand generation as a nested problem, consisting of pattern choice, location choice, time choice, and mode choice (e.g. Bowman, 1998). An agent faced with the activity scheduling task first makes the pattern decision, then the location decision, etc. The decision at each level depends on the expected utility of each sub-tree. This means that, in order to compute the decision, one needs to start at the bottom leaves and iteratively propagate the utilities to the upper branches.
To understand this, let us index patterns with ![]() , locations with
, locations with
![]() , times with
, times with ![]() , and mode with
, and mode with ![]() . The utility of a complete
decision is denoted
. The utility of a complete
decision is denoted ![]() . Now, for a given
. Now, for a given ![]() , the
algorithm evaluates the different utilities for all
, the
algorithm evaluates the different utilities for all ![]() , and from
that computes the expected utility for the choice
, and from
that computes the expected utility for the choice ![]() .
And here lies an important difference between different choice models:
While in most computer science search algorithms, this would just be
the maximum utility (i.e.
.
And here lies an important difference between different choice models:
While in most computer science search algorithms, this would just be
the maximum utility (i.e.
![]() ), in random
utility theory it is the expected maximum utility. For nested
logit models, this is the famous logsum term
), in random
utility theory it is the expected maximum utility. For nested
logit models, this is the famous logsum term
![]() .
.
The algorithm then computes utilities for all ![]() given
given ![]() , and from
that computes the expected utility for the choice
, and from
that computes the expected utility for the choice ![]() . This
continues until the computation has reached the root of the decision
tree. At this point, the algorithm turns around and goes down the
decision tree, at each decision point making the best choice. Again,
in computer science search, this choice would just be the best option,
while in nested logit, an option is chosen with a probability
proportional to
. This
continues until the computation has reached the root of the decision
tree. At this point, the algorithm turns around and goes down the
decision tree, at each decision point making the best choice. Again,
in computer science search, this choice would just be the best option,
while in nested logit, an option is chosen with a probability
proportional to ![]() .
.
This seemingly small difference between ``selecting the max at each
decision point'' and ``selecting according to ![]() at each
decision point'' has very important consequences in terms of the
search complexity: While the choice of the maximum allows to cut off
branches of the search tree that offer no chance of success, in
probabilistic choice all branches of the search tree need to be
evaluated.
This means that many efficient computer science methods cannot be used
for random utility theory. More distinctly, evaluating a model
using random utility theory is much more costly than evaluating a
model using plain maximization. Now since many of the behavioral
search problems cannot even be solved optimally using ``max''
evaluation, there is little hope that we will be able to directly
solve the same problems using the even more costly random utility
framework.
at each
decision point'' has very important consequences in terms of the
search complexity: While the choice of the maximum allows to cut off
branches of the search tree that offer no chance of success, in
probabilistic choice all branches of the search tree need to be
evaluated.
This means that many efficient computer science methods cannot be used
for random utility theory. More distinctly, evaluating a model
using random utility theory is much more costly than evaluating a
model using plain maximization. Now since many of the behavioral
search problems cannot even be solved optimally using ``max''
evaluation, there is little hope that we will be able to directly
solve the same problems using the even more costly random utility
framework.
In consequence, at this point it makes sense to look at alternatives, such as the following:
In this context, note that route choice is maybe not a good field to explore this since route choice is one of the few fields where the optimal solution, albeit maybe not behaviorally realistic, is extremely cheap to compute, much cheaper than most heuristic solutions.
A relatively new set of heuristic search algorithms are ``evolutionary
algorithms''. This is a field that looks at biology and evolution for
inspiration for search and optimization algorithms. Examples are
Genetic Algorithms (Goldberg, 1989), Neural Nets,
Simulated Annealing, or Ant Colony Optimization
(Dorigo et al., 1999). These algorithms compete with methods from
Numerical Analysis (such as Conjugate Gradient) and from Combinatorial
Optimization (such as Branch-and-Bound). In our experience, the
outcome in these competitions is consistently that, if a
problem is well enough understood that methods from Numerical Analysis
or from Combinatorial Optimization can be used, then those methods are
orders of magnitude better. For example: There is a library of test
instances of the traveling salesman problem (www.iwr.uni heidelberg.de/groups/comopt/software/TSPLIB95/, accessed
2003), and there
is a collection of the computational performances of many different
algorithms when applied to those instances (www.research.att.com/ ![]() dsj/chtsp/, accessed
2003). The
largest instances of the traveling salesman problem that a typical
evolutionary algorithm solves, using several hours of computing time,
are often so small that a Combinatorial Optimization algorithm solves
the problem in so short a time that is is not measurable.
dsj/chtsp/, accessed
2003). The
largest instances of the traveling salesman problem that a typical
evolutionary algorithm solves, using several hours of computing time,
are often so small that a Combinatorial Optimization algorithm solves
the problem in so short a time that is is not measurable.
In contrast, evolutionary algorithms are always useful when the problem is not well understood, or when one expects the problem specification to change a lot. For example, an evolutionary algorithms will not complain if one introduces shop closing times into an activity scheduling algorithm, or replaces a quadratic by a piecewise linear utility function. Faced with such problems, the evolutionary algorithms usually deliver ``good'' solutions within acceptable computing times and with relatively little coding effort.
This characterization makes, in our view, evolutionary algorithms very interesting for travel behavior research, since both according to random utility theory and according to our own intuition, this is exactly what humans do: find good solutions for problems within reasonable amount of time, and consistently find such good solutions even when circumstances change.
An interesting research issue would be to explore the distribution of
solutions in the solution space. Maybe there are evolutionary
algorithms that generate solutions of quality ![]() with probability
with probability
![]() , but in much less time than the full search algorithm.
, but in much less time than the full search algorithm.
The necessity of initial and boundary conditions was described in Sec. 2.1. There is probably very little debate that databases are extremely useful to maintain information such as road network information or census data. There are now many commercial or public domain products which support these kinds of applications. Standard databases are always easy to use when the data consist of a large number of items that all have the same attributes. For example, a road link can have a from-node, a to-node, a length, a speed limit, etc.
The two most common situations are that of a GIS database and that of a database management system (DBMS) using an SQL relational database. Note that most GIS vendors provide gateways to link their software to SQL DBMS. Besides data management issues, the main advantages of using SQL DMBS is their flexibility. Data can exported and imported between simulation modules that are totally independent and useful statistics can be extracted very easily. URBANSIM (Waddell et al., 2003) and METROPOLIS (de Palma and Marchal, 2002) use that approach to store input and output data. The performance bottleneck of SQL DBMS is often the sorting of records and the insertion of new records. When these individual operations are performed at a very high rate, such as inside a simulation loop, the usage of a SQL DBMS severly deteriorates the overall performance. But when these operations are performed in bulk, these systems can be very efficient. For instance, at the end of a METROPOLIS simulation, the insertion of 1 million agents with 15 characteristics each in the underlying MySQL database takes only 2 sec. on a Pentium 4. MySQL (www.mysql.com, accessed 2003) is fast becoming a de facto standard because it is open-source, easy to manage, performant and it already integrates some geographic features of the OpenGIS specification (www.opengis.org, accessed 2003).
However, even the data for initial and boundary conditions is not entirely static. Changes can happen for the following reasons:
The arguably main commercial application of standard databases are financial transactions. The task of such a system is to maintain a consistent view of the whole system at each point in time, to do this in a very robust way that survives failures, and to maintain a record of those states and the transactions connecting them.
Database applications for initial and boundary conditions are, in contrast, rather different. Our data is not defined by the transactions; rather, transactions are used to define the data. That is, a standard database will solve the problem of keeping the data current, but it will not solve the problem of retro-active changes, which are imposed by error corrections, higher detail imports, or scenarios. There seems to be very little database support for such operations. Some examples:
This makes it impossible to keep a database up to date while some other team is using it to run a study. The record and production of snapshots of the database is thus a crucial feature.
When thinking about this, one recognizes that a similar mechanism needs to be employed for error correction. Essentially, it is necessary that data entries are never deleted. If one wants to correct supposedly erronous data entries, then the whole record needs to be copied, in the copy the erronous is corrected, and flags are adjusted so that the situation is clear. In that way, a study relying on the faulty record can still use that faulty record until the whole study is finished.
Now while it is clear that the above is feasible, it is also clear that it will be prone to errors. In particular, there is the all-too-human tendency to correct errors without telling anybody. In consequence, some software support for these operations would be useful. With current databases, it is possible to maintain a log of all operations, and so it is in principle possible to go back and find out who changed which entry when. This is however not sufficient: What is needed is a system that allows us to retrieve some data in the status it was at a certain point in time, no matter what the later changes are. And in fact, there are systems which do exactly what we want, but unfortunately only for text files and not for databases. These systems are called version control systems, and they are for example used for software development. The ``change log'' system of some text processors such as MS-Word and Openoffice is a related, albeit simpler system. An example of a version control system is CVS (www.cvshome.org, accessed 2003); it has the advantage that it works across different operating systems and that it allows remote access. Nearly all public domain software these days uses CVS.
Version control systems provide the following functionality:
In our view, it makes sense that the primary data for initial and boundary conditions is as close to the physical reality as possible, since in our view that is the best way to obtain an unambiguous description. For example, it makes more sense to store ``number of lanes'', ``speed limit'', and ``signal phases'', rather than ``capacity'', since the latter can be derived from the former (at least in principle), but not the other way round. In part, this will be imposed to the community by the commercial vendors, which have an interest to sell data that is universally applicable, rather than geared to a specific community.
If the primary source of data is highly disaggregated, it is tempting to keep this high level of detail all through the forecast models, and projects such as TRANSIMS, METROPOLIS, and MATSIM develop large-scale simulation models that may, in the long run, be able to cope with highly disaggregated data for the physical layer and thus avoid any aggregation. However, this is not always feasible from the computational point of view, and therefore systems that run on more aggregated data will continue to exist. Unfortunately, the aggregation of much of traffic-related data is an unsolved problem - while it is straightforward to aggregate the number of items in cells in a GIS to larger cells, aggregating network capacity to a reduced graph is far from solved. There needs to be more research into multi-scale approaches to travel behavior simulations.
Even if these problems get eventually solved, we firmly believe that models should make the aggregation step transparent. That is, there should be universally available data, which, for the ambiguity reasons stated above, should be as disaggregated as possible, and then aggregation should appear as an explicit feature of the model rather than as a feature of the input data. Conversely, the results/forecasts should be, if possible, projected back to the original input data.
Another issue with respect to databases that probably many of us have faced is the merging of data sets. Let us assume the typical case where we have some large scale traffic network data given, and some sensor locations registered for that network. Now we obtain a higher resolution description of a smaller geographical area. One would like to do the following:
Some of the problems of data consistency will go away with the emergence of a few internationally operating data vendors. They will define the data items that are available (which may be different from the ones that we need), and they will make consistent data available at pre-defined levels. For example, it will be possible to obtain a data set which contains all European long-distance roads, and we would expect that it will be possible to obtain a consistent upgrade of the Switzerland area to a higher level of detail.
We are a bit more skeptic towards the commitment of such companies to historical data. With little cost, companies could make snapshots of the ``current view of the current system'', and one could thus obtain something like the ``year 2000 view of the year 2000 system''. There would, however, also be the ``current view of the year 2000 system'', or ``intermediate views of the year 2000 system''. The first would be useful to start a historical study; the second would be useful to add data consistently at some later point in time.
Finally, there will probably always be local error correction of the type ``company XY always gets A and B wrong and so we always correct it manually''. Obviously, such changes need to be well-documented and well-publicized.
In our view, there is no system that manages the scenario data changes consistently as outlined above; in consequence, there is also no simulation system that manages consistently dependencies of simulation result on input data. A system should at least be able to remember what has happened to the data and what part of the forecast it affects. Some transportation planning software systems have made progress in that direction, e.g. EMME/2 and METROPOLIS.
EMME/2 (INRO Consultants Inc., 1998) comes with a binary-formatted, proprietay database (the so-called databank file). This file contains the description of the transportation network (links with lanes, length, capacities) and the travel demand in the form of OD matrices. EMME/2 proposes the definition of scenarios that consist in pairing networks and matrices and performing the assignment. EMME/2 designers recognized earlier the importance of tracing back all the modification done to the complex network layer: each change of a single attribute of the links is recorded and can be brought back. This feature is reminiscent of the roll-back feature of relational databases. However, once an assignment is performed, the output variables (here the traffic volumes) do not follow the same handling: these variables are erased after each assignment and have to be kept manually in user-defined vectors. The modifications of the initial data does not invalidate the results. However, EMME/2 provide the feature of multiple scenarios so that the end-user can modify the network of another scenario, run the assignment, and compare the scenarios. It is left ot the discipline of the user not to modify the initial data thereafter.
METROPOLIS use the same network description (not storage) as EMME/2. It uses also an OD matrix but with an extra layer of agent description called ``user types'' that define user constraints in term of schedule. METROPOLIS uses an open SQL relational database (MySQL) to store all the initial data it needs: networks, matrices, users, scenarios. The roll-back feature is delegated to the database. The idea is that, even if it useful to be able to roll-back, it is often unusable when the number of components that have changed is huge. For instance, if all the capacities of the network are multiplied by 1.1, it will not be possible to understand the modifications unless it is documented with a log. However, METROPOLIS maintains the consistency of data throughout the simulation process: no data can be modified that have been used in a completed simulation. METROPOLIS distinguishes different bulks of data sets: networks, matrices, user-types, function sets, demands, supplies and finally, simulations (Fig 4). Each of these major blocks encapsulates a whole set of disaggregated data (e.g. networks have thousands of links). This decomposition is arbitrary and only intented to ease the use of creating scenarios by mixing variants. Each of these data sets can be in one of the 3 different states: free, editable or locked. In the free state, the data block can be erased/modified without compromising results or other data sets. In the editable state, other data blocks depend on this one and so this one cannot be deleted without deletion of the dependent blocks; however no simulation has been performed using it and it can still modify its internal attributes. In the locked state, it means that some simulation has been or is using the data set and so the data set cannot be modified. By doing so, the METROPOLIS inner database ensures that whatever results is still in the database contains also the exact initial data set of the simulation. However, no log is kept of the modifications that might have been done to generate the initial set and it is left to the end-user to write something in the comment attribute of each data block. Each data block can be duplicated/deleted/documented to ease the replication of experiments and the comparisons between forecasts that share some data blocks.
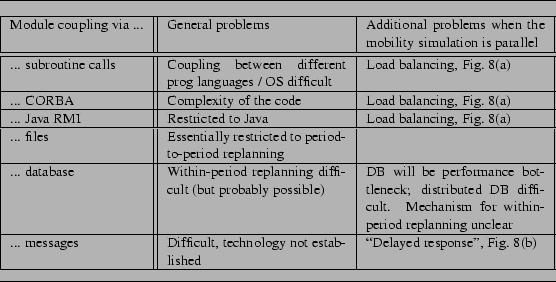
As pointed out earlier, multi-agent transportation simulation systems consist of many cooperating modules, such as the synthetic population generation module, the housing market module, the activity generation module, etc. An important issue for the future development of multi-agent transportation simulations is the coupling between those modules, i.e. how they cooperate to form a coupled simulation system.
Despite many efforts, the easiest solution in terms of the implementation of a simulation package is still to have a single person writing a complete system for a single CPU on a single operating system (OS). In addition, all tightly coupled modules should use the same programming language since that considerably simplifies the coding of module interaction.
With multi-person projects, the argument remains the same: The easiest approach is to program for a single-CPU system and have everybody use the same OS and the same programming language at least for tightly coupled modules. However, as models evolve, it is desireable to be able to plug-in new modules without compromising the whole architecture. This section will explore technologies for this purpose.
The coupling of the modules also depends on their synchronization. Obviously, the organization of how user decisions take place on the time scale affects considerably the way the modules will interact. When decisions are revised frequently in the simulation, it imposes to have a coupling implementation that is computationally efficient.
There are many ways to couple modules and all methods have their own
advantages and disadvantages. The first one that comes to mind is to
couple them via regular subroutine calls. For instance, the
traffic (![]() mobility) simulation can be suspended at regular
intervals and each agent is asked if he/she wants to replan. If the
answer is yes, the corresponding subroutine is called. Once all agents
are treated, the system returns to the traffic simulation thread.
mobility) simulation can be suspended at regular
intervals and each agent is asked if he/she wants to replan. If the
answer is yes, the corresponding subroutine is called. Once all agents
are treated, the system returns to the traffic simulation thread.
The advantages of this method are that it corresponds to long-established programming methods, and that its logical scheduling is easy, in the sense that while a traveler ``thinks'', the flow of the real world is suspended. This makes it rather easy to model all kind of thought models, including immediate or delayed response.
The disadvantages of this method are that the different methods need to be compatible on some level, which usually means that they are written in the same programming language on the same OS. In addition, the approach is not amenable to a parallel implementation, as will be discussed in Sec. 3.7.2. The more strategic modules one includes, the less time the CPU will have to advance the simulation of the physical system. Large scale scenarios are infeasible with this method.
Often, different strategy generation modules come from different model writers. Some group might provide a router, some other group an activity generation module, and the next group a housing choice module. All of these modules may be coded in different programming languages and on different OSs. For such modules, coupling via subroutine calls is no longer possible. In such a case, the maybe first thing that comes to mind is to couple them via files. This approach is in fact followed by many groups, including TRANSIMS and some of our own work.
A question here is which file format to use. TRANSIMS uses line-oriented text files. This works well as long as the data are column-oriented, such as files for links and nodes. It becomes considerably more awkward with respect to agent information, which is less well structured:
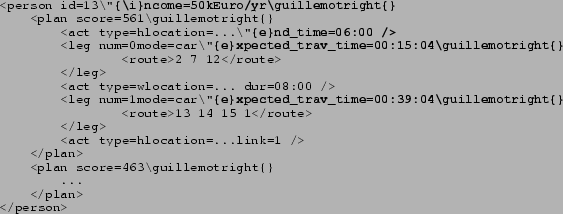
The example denotes a traveler agent with two plans, one with score
(![]() utility) of
utility) of ![]() and one with score
and one with score ![]() . The first plan
is given in more detail, it consists of an activity chain of
``home-work-home'', together with some location information whose
exact type (e.g. street address, x/y coordinate, link ID) is not
specified here. In addition, there is information on activity
scheduling times, and on travel times.
. The first plan
is given in more detail, it consists of an activity chain of
``home-work-home'', together with some location information whose
exact type (e.g. street address, x/y coordinate, link ID) is not
specified here. In addition, there is information on activity
scheduling times, and on travel times.
The point here is not to debate the details of the data entries; the two important points are the following:
The arguably easiest way to implement file-based module coupling is to do it together with period-to-period (e.g. day-to-day, year-to-year) replanning: The simulation of the physical system is run based on precomputed plans and the behavior of the simulation is recorded, some or all of the strategic modules are called, the simulation is run again, etc.
The file-based approach solves possible data exchange issues between different programming languages and different OS, but it does not solve the performance issue: The assumption is still that at any given point in time, only a single CPU is advancing the simulation. It is however possible to parallelize each individual module. This will be discussed in Sec. 3.6.
An alternative to files is to use remote procedure calls (RPC). Such systems, of which CORBA (Common Object Request Broker Architecture; www.corba.org, accessed 2003) is an example, allow to call subroutines on a remote machine (called ``server'') in a similar way as if they were on the local machine (called ``client''). There are at least two different ways how this could be used for our purposes:
Another option is to use Java RMI (java.sun.com/products/jdk/rmi, accessed 2003) which allows Remote Method Invocation (i.e. RPC on java objects) in an extended way. Client and server can exchange not only data but also pieces of code. For instance, a computing node could be managing the agent database and request from a specific server the code of the module to compute the mode choice of its agents. It is easier with Java RMI than with CORBA to have all nodes acting as servers and clients and to reduce communication bottlenecks. However, the choice of the programming language is restricted to Java.
It is important to notice the difference between RPC and parallel computing, discussed in Sec. 3.6. RPCs are just a replacement for standard subroutine calls which are useful for the case that two programs that need to be coupled use different platforms and/or (in the case of CORBA) different programming languages. That is, the simulation would execute on different platforms, but it would not gain any computational speed by doing that since there would always be just one computer doing work. In contrast, parallel computing splits up a single module on many CPUs so that it runs faster. Finally, distributed computing (Sec. 3.7) attempts to combine the interoperatility aspects of remote procedure calls with the performance aspects of parallel computing.
The main advantage of using of CORBA and other object broker mechanisms is to glue heterogeneous components. Both DynaMIT and DYNASMART projects use CORBA to federate the different modules of their respective real-time traffic prediction system. The operational constraint is that the different modules are written in different languages on different platforms, sometimes from different projects. For instance, the graphical viewers are typically run on Windows PCs while the simulation modules and the database persistency are carried out by Unix boxes. Also, legacy software for the data collection and ITS devices need to be able to communicate with the real-time architecture of the system. Using CORBA provides a tighter coupling than the file-based approach and a cleaner solution to remote calls. Its client-server approach is also useful for critical applications where components may crash or fail to answer requests. However, the application design is more or less centered around the objects that will be shared by the broker. Therefore, it looses some evolvability compared to XML exchanges for instances.
Everybody knows from personal experience that it is possible to embed requests and answers into HTTP protocols. An more flexible extension of this would once more use XML. The difference to the RPC approach of the previous section is that for the RPC approach there needs to be some agreement between the modules in terms of objects and classes. For example, there needs to be a structurally similar ``traveler'' class in order to keep the RPC simple. If the two modules do not have common object structures, then one of the two codes needs to add some of the other code's object structures, and copy the relevant information into that new structure before sending out the information. This is no longer necessary when protocols are entirely based on text (including XML); then there needs to be only an agreement of how to convert object information into an XML structure. The XML approach is considerably more flexible; in particular, it can survive unilateral changes in the format. The downside is that such formats are considerably slower because parsing the text file and converting it into object information takes time.
Another alternative is to couple the modules via a database. This could be a standard relational database, such as Oracle (www.oracle.com/products, accessed 2003) or MySQL (www.mysql.com, accessed 2003). Modules could communicate with the database directly, or via files.
The database would have a similar role as the XML files mentioned above. However, since the database serves the role of a central repository, not all agent information needs to be sent around every time. In fact, each module can actively request just the information that is needed, and (for example) only deposit the information that is changed or added.
This sounds like the perfect technology for multi-agent simulations. What are the drawbacks? In our experience, the main drawback is that such a database is a serious performance bottleneck for large scale applications with several millions of agents. Our own experience refers to a scenario where we similated about 1 mio Swiss travelers during the morning rush hour Raney and Nagel (2003). The main performance bottleneck was where agents had to chose between already existing plans according to the score of these plans. The problem is that the different plans which refer to the same agent are not stored at the same place inside the database: Plans are just added at the end of the database in the sequence they are generated. In consequence, some sorting was necessary that moved all plans of a given agent together into one location. It turned out that it was faster to first dump the information triple (travelerID, planID, planScore) to a file and then sort the file with the Unix ``sort'' command rather than first doing the sorting (or indexing) in the database and then outputting the sorted result. All in all, on our scenario the database operations together consumed about 30 min of computing time per iteration, compared to less than 15 min for the mobility simulation. That seemed unacceptable to us, in particular since we want to be able to do scenarios that are about a factor of 10 larger (24 hours with 15 mio inhabitants instead of 5 hours with 7.5 mio inhabitants).
An alternative is to implement the database entirely in memory, so that it never commits to disk during the simulation. This could be achieved by tuning the parameters of the standard database, or by re-writing the database functionality in software. The advantage of the latter is that one can use an object-oriented approach, while using an object-oriented database directly is probably too slow.
The approach of a self-implemented ``database in software'' is indeed used by URBANSIM (www.urbansim.org, accessed 2003; Waddell et al., 2003). In URBANSIM there is a central object broker/store which resides in memory and which is the single interlocutor of all the modules. Modules can be made remote, but since URBANSIM calls modules sequentially, this offers no performance gain, and since the system is written in Java, it also offers no portability gain. The design of URBANSIM forces the modules writers to use a certain canvas to generate their modules. This guarantees that their module will work with the overall simulation.
The Object Broker in URBANSIM originally used Java objects, but that turned out to be too slow. The current implementation of the Object Broker uses an efficient array storing of objects so as to minimize memory footprint. URBANSIM authors have been able to simulate systems with about 1.5 million objects (Salt Lake city area).
In our own work, we use an object-oriented design of a similar but simpler system, which maintains strategy information on several millions of agents. In that system, 1 million agents with about 6 plans each need about 1 GByte of memory, thus getting close to the 4 GByte limit imposed by 32 bit memory architectures.
Regarding the timing (period-to-period vs. within-period replanning), the database approach is in principle open to any approach, since modules could run simultaneously and operate on agent attributes quasi-simultaneously. In practice, URBANSIM schedules the modules sequentially, as in the file-based approach. The probable reason for this restriction is that there are numerous challenges with simultaneously running modules. This will be discussed in Sec. 3.7.
In this paper, we will distinguish between parallel and distributed computing. By parallel computing we mean that an originally sequential module uses a parallel computer to break it down into sufficiently small problems that can fit into the memory of a single system or to improve the execution speed of the module. While the memory issue will become less important with the advent of 64-bit PC CPUs that can address more than 4 GByte of memory, the performance issues will not go away. It is an obvious incentive to distribute agents on different computers and to apply the same code in parallel to each subset. But different agents may need different decision modules at the same simulation epoch. For instance once an agent select his/her travel mode, a transit line choice module is invoked or a car route module is invoked, which may be totally different. Therefore, the distribution of agents on different nodes implies the cooperation of heterogeneous modules, which will be addressed in the section about distributed computing. This section focuses strictly on the first aspect, i.e. the homogeneous acceleration of a single module by the use of more than one CPU.
Let us first look at a parallel computer from a technical perspective. There are currently two important concepts to parallel computing, shared memory and distributed memory.
Distributed memory machines are easy to explain: They behave like a large number of Pentium computers coupled via a fast network. Each CPU obtains a part of the problem, and the different processes on the different CPUs communicate via messages. One can maybe differentiate three different classes of distributed memory computers:
The advantage of Beowulf clusters is that, because they use commodity hardware, their cost per CPU cycle is relatively low.
In contrast to distributed memory machines, in shared memory machines all CPUs are combined in a single computer. Shared memory machines can be understood as an extension of the dual-CPU Pentium box, that is, many processors (currently up to 128) share the same memory. Beyond about four CPUs, the necessary hardware becomes rather expensive, since it is necessary to give each CPU full bandwidth access to every part of the large memory. Additional overhead is incurred because the shared memory needs to be locked and unlocked when one of the CPUs wants to write to it in order to avoid corrupted data.
The result is that distributed memory machines can be a factor of ten cheaper than shared memory machines for the same number of CPU cycles. However, shared memory machines are sometimes easier to program, and they are faster when a program uses many non-local operations (operations where each CPU needs information from most if not all other CPUs). They also usually have more reliable hardware than the low-cost Beowulf clusters. Nevertheless, in transportation large scale shared memory machines are rarely used, because of two reasons:
While many UNIX-only CPUs such as from DEC, HP, or SUN have had 64-bit architectures for many years now, the first Intel-type CPUs capable of 64-bit addressing are coming out this year (2003).
10000
For distributed memory machines, information needs to be exchanged between the computational nodes. This is typically done via messages. Messages are easiest implemented via some kind of message passing library, such as MPI (www-unix.mcs.anl.gov/mpi/mpich, accessed 2003) or PVM (www.epm.ornl.gov/pvm/pvm_home.html, accessed 2003). Besides initialization and shutdown commands, the most important commands of message passing libraries are the send and receive commands. These commands send and receive data items, somewhat comparable to sending and receiving postal mail.
In contrast, jobs on shared memory machines can exchange information between jobs by simply looking at the same memory location. Such jobs that share the same memory area are often called threads (although the word ``threads'' is also used in the more general context of ``parallel execution threads'').
Within the area of parallel computing, there are different degrees of parallelism that can be exploited:
The speed-up in this case is usually linear, that is, ![]() CPUs lead to
a factor of
CPUs lead to
a factor of ![]() increase in execution speed.
increase in execution speed.
The prime example for this case, with linear speed-up but tight
coupling, are all time-stepped simulations where the update of each
simulation entity (objects, cells, ...) from time ![]() to time
to time ![]() depends on local information from time
depends on local information from time ![]() only. In that case, one
can update all objects simultaneously, followed by an information
exchange step.
only. In that case, one
can update all objects simultaneously, followed by an information
exchange step.
The speed-up in this case is usually linear, but often advanced communication hardware is necessary for this.
Another typical example for this case are discrete event simulations, where each event potentially depends on the previous event. If they underlying system is a physical system, then there are limits on the speed of causality that one can exploit. For example, it is clearly implausible that a speed change of a vehicle influences, within the same second, another vehicle that is several kilometers away. There is some mathematical research into such dependency graphs (e.g. Barrett and Reidys, 1997). Also note results in parallel dynamic shortest path algorithms (Chabini, 1998).
![\includegraphics[width=0.8\hsize]{gz/SwissDecomp.eps.gz}](img56.png)
|
In this section, we will look at software that supports parallel computing. Since by parallel computing we mean symmetric multi-processing, i.e. the fact that many threads act in parallel at the same hierarchial level, this excludes client-server methods such as CORBA, Jini, or Java RMI although they can be tweaked to be used for symmetric multi-processing. Aspects of this will be discussed in Sec. 3.7.
Sometimes, parallelism can be achieved by just calling the same executable many times, each time with different parameters. This is for example common in Monte Carlo simulations in Statistical Physics, where the only difference between two runs is the random seed, or for sensitivity analysis for example in construction, where one is interested in how a system changes when any of a large number of parameters is changed from its base value. In multi-agent traffic simulations, one could imagine starting a separate activity planner, route planner, etc., for each individual agent. If each individual job runs long enough, the Operating System can be made responsible for job migration: If the load on one computer is much higher than the load on another computer, then a job may be migrated. Support for this does not only exist for shared memory machines (where it is taken for granted), but also for example for Linux clusters (Mosix, www.mosix.org, accessed 2003).
A disadvantage of the Mosix-approach is that there is very little control. Essentially, one starts all jobs simultaneously, and the Operating System will distribute the jobs. However, if there are many more jobs than CPUs, this is not a good approach, since there will still remain large numbers of jobs per CPU, slowing down the whole process. In addition, there is no error recovery if one CPU fails. For that reason, there is emerging software support for better organization of such parallel simulations. An example of this is the Opera project, which allows to pre-register all the runs that one wants to do, and which then looks for empty machines where it starts the runs, keeps track of results, and re-starts runs for certain parameters if results do not arrive within a certain time-out (www.inf.ethz.ch/department/IS/iks/research/opera.html, accessed 2003).
For our simulations in the traffic area, however, it unfortunately turned out that the amount of computation per agent is too small to make either Mosix or Opera a viable option: Too much time is spent on overhead such as sending the information back and forth. An alternative is to bunch together the requests for several agents, but this makes the design and maintenance of the code considerably more complicated again. This is sometimes called ``fine-grained'' vs. ``coarse-grained'' parallelism. Despite of the relative simplicity of this approach, we are not aware of a project within transportation simulation which exploits this type of parallelism systematically.
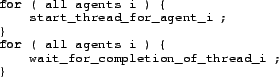
Mosix or Opera perform parallelization by having separate executables. An alternative is to perform parallelization within the code: If there are several threads in a code that could be executed simultaneously, this could be done by threads. In pseudo-code, this could look like
10000
Note that start_thread just starts the thread and then returns
(i.e. continues). In contrast, wait_for_completion continues
when the corresponding thread is completed. That is, if the
corresponding thread is completed before wait_for_completion is
called, then wait_for_completion immediately returns.
Otherwise it waits. The result is that all threads execute
simultaneously on all available CPUs, and the code continues
immediately once all threads are finished.
Such code runs best on shared memory machines using POSIX threads for instance. Similar technology can in principle be used for distributed machines but is less standard (e.g. www.ipd.uka.de/JavaParty, accessed 2003). In addition, on distributed machines thread migration takes considerable time, so that starting threads on such machines only makes sense if they run for relatively long time (at least several seconds).
All the above approaches only work either on shared memory machines or if the individual execution threads run independently for quite some time (several seconds). These assumptions are no longer fulfilled if one wants to run the simulation of the physical system (traffic micro-simulation) on a system with distributed memory computers. In such cases, one uses domain decomposition and message passing.
10000
Domain decomposition, as already explained earlier, means that one
partitions space and gives each local area to a different CPU
(Fig. 5). For irregular domains, such as given by the
graphs that underly transportation simulations, a graph decomposition
library such as METIS (www-users.cs.umn.edu/ ![]() karypis/metis/, accessed
2003) is helpful.
karypis/metis/, accessed
2003) is helpful.
Once the domains are distributed, the simulation of all domains is started simultaneously. Now obviously information needs to be exchanged at the boundaries; in the case of a traffic simulation, this means vehicles/travelers that move from one domain to another, but it also means information about available space into which a vehicle can move and on which the driving logic depends.
10000
Software support for this is provided by message passing libraries such as MPI (www-unix.mcs.anl.gov/mpi/mpich, accessed 2003) and PVM (www.epm.ornl.gov/pvm/pvm_home.html, accessed 2003). Originally, MPI was targeted towards high performance supercomputing on a cluster of identical CPUs while PVM was targeted towards inhomogeneous clusters with different CPUs or even Operating System on the computational nodes. In the meantime, both packages have increasingly adopted the features of the other package so that there is now a lot of overlap. Our own experience is that, if one is truly interested in high performance, MPI still has an edge: Its availability on high-performance hardware, such as Myrinet or parallel high-performance computers, is generally much better.
A critical issue of parallel algorithms is load balancing: If one CPU
takes considerably longer than all others to finish its tasks, then
this is obviously not efficient. With fine-grained parallelism, this
is not an issue: With, say, ![]() agents and
agents and ![]() CPUs, one would
just send the first
CPUs, one would
just send the first ![]() agents to the
agents to the ![]() CPUs, and then each
time the computation for an agent is finished on a CPU, one would send
another agent to that CPU, until all agents are treated. As said
above, unfortunately this is inefficient in terms of overhead, and it
is much better to send
CPUs, and then each
time the computation for an agent is finished on a CPU, one would send
another agent to that CPU, until all agents are treated. As said
above, unfortunately this is inefficient in terms of overhead, and it
is much better to send ![]() agents to each CPU right away. In this
second case, however, it could happen that some set of agents needs
much more time than all other sets of agents.
agents to each CPU right away. In this
second case, however, it could happen that some set of agents needs
much more time than all other sets of agents.
In such cases, one sometimes employs adaptive load balancing, that is, CPUs which lag behind offload some of their work to other CPUs. In the case of iterative learning iterations, those iterations can sometimes be used for load balancing (Nagel and Rickert, 2001). It is however our experience that in most cases it is sufficient to run a ``typical'' scenario, extract the computing time contributions for each entity in the simulation (e.g. each link or each intersection), and then use this as the basis for all load balancing in subsequent runs. Clearly, if one scenario is very different from another one (say, a morning rush hour compared to soccer game traffic), then the load balancing may be different.
Important numbers for parallel implementations are real time ratio, speed-up, and efficiency:
Speed-up is limited by a couple of factors. First, the software
overhead appears in the parallel implementation since the parallel
functionality requires additional lines of code. Second, speed-up is
generally limited by the speed of the slowest node or processor. Thus,
we need to make sure that each node performs the same amount of work.
i.e. the system is load balanced (see above). Third, if the
communication and computation cannot be overlapped, then the
communication will reduce the speed of the overall application.
A final limitation of the speed-up is known as Amdahl's Law.
This states that the speed-up of a parallel algorithm is
limited by the number of operations which must be
performed sequentially. Thus, let us define, for a sequential program,
![]() as the amount of the time spent by one processor on sequential
parts of the program and
as the amount of the time spent by one processor on sequential
parts of the program and ![]() as the amount of the time spent by
one processor on parts of the program that can be parallelized. Then,
we can formulate the serial run-time as
as the amount of the time spent by
one processor on parts of the program that can be parallelized. Then,
we can formulate the serial run-time as
![]() and
the parallel run-time as
and
the parallel run-time as
![]() .
Therefore, the serial fraction
.
Therefore, the serial fraction ![]() will be
will be
![]() ,
and the speed-up
,
and the speed-up ![]() is
is
As an illustration, let us say, we have a program of which 80% can be
done in parallel and 20% must be done sequentially. Then even for ![]() , we have
, we have
![]() , meaning that even with an
infinite number of processors we are no more than 5 times faster than
with a single processor.
, meaning that even with an
infinite number of processors we are no more than 5 times faster than
with a single processor.
For multi-agent transportation simulations, the strategy computing modules are easy to parallelize since all agents are independent from each other. In the future, one may prefer to generate strategies at the household level, but that still leaves enough parallelism. More demanding with regards to parallel performance would be inter-household negotiations such as for social activites or for ride sharing. This is however virtually unexplored even in terms of modeling, let alone implementation.
This leaves the mobility simulation. In the past, this was considered the largest obstacle to fast large-scale multi-agent transportation simulations. It is however now possible to run systems with several millions of agents about 800 times faster than real time, meaning that 24 hours of (car) traffic in such a system can be simulated in about 2 minutes of computing time (Fig. 6). The technology behind this is a 64 CPU Pentium cluster with Myrinet communication (Cetin and Nagel, 2003); the approximate cost of the whole machine (excluding file server) is about 200 kEuro - expensive, but still affordable when compared to the 100 MEuro that a typical supercomputer costs. Computing speeds by other parallel mobility simulations is given in Tab. 1.
![\includegraphics[width=0.5\hsize]{rtr-gpl.eps}](img74.png)
![\includegraphics[width=0.5\hsize]{speedup-gpl.eps}](img75.png)
|
These results make clear that in terms of computing speed the traffic simulation, or what is called the ``network loading'' in dynamic assignment, is no longer an issue (although considerable work will still be necessary to fine-tune the achievements and make them robustly useful for non-experts in the area). This means that, at least in principle, it is now possible to couple agent-based travel behavior models on the strategy level with agent-based mobility simulations on the physical level. This should make it possible to have consistent completely agent-based large scale transportation simulation packages within the foreseeable future.
Using MPI and C++ for parallel computing is a mature and stable technology for parallel computing and can be recommended without reservations. Diligent application of these technologies makes very fast parallel mobility simulations - 800 times faster than real time with several million travelers - possible. This has so far been demonstrated with simple traffic dynamics (the queue model; Cetin and Nagel, 2003); the fastest parallel simulation with a more complicated traffic dynamics is, as far as we know, TRANSIMS with a maximum published computational speed of 65 times faster than real time (Nagel and Rickert, 2001). This implies that a realistic and fast enough agent-based traffic simulation, if this is desired, is perfectly feasible.
In addition, running the strategy computations for several million agents is expected to be easy to parallelize since, given current methods, those computations are essentially independent except at the household level. As was discussed, future methods will probably incorporate inter-household interaction already at the strategy level (leisure; ride sharing), which will make this considerably more challenging.
A remaining problem is the coupling of parallel modules. As long as the modules are run sequentially, several good methods are available to solve the problem. Sequential modules imply that as long as one module is running, no other modules can interfere with changes. For example, travelers cannot replan routes or schedules during a day. Once one wants to loosen that restriction and allow within-period replanning, then designing an efficient and modular parallel computing approach remains a challenge. This will be discussed in the next section.
The last section, on parallel computing, has explored possibilities to accelerate single modules by parallelizing them. Module coupling in a parallel environment was not discussed. This will be done in this section. Note that already Sec. 3.5 discussed aspects of how to couple modules that run potentially on different computers. However, in that section it was still assumed that the modules would run sequentially, not simultaneously. Running different modules simultaneously is the new aspect that will be explored in this section.
There are two main reasons to consider distributed computing. Firstly, as the realism of the simulation improves, more data are assigned to the agents, not only the socio-economic characteristics but also the inner modeling of the decision process. For instance, a million agents that remember their last 10 daily activities and journeys requires about 1GByte of memory. As mentioned, this issue will be of lesser importance with the advent of 64-bit computers. Nevertheless, distributed computing is useful for the simulation of very large problems (e.g. larger metropolitan areas). Secondly, the learning mechanims and the reactions are not synchronous: agents may alter their decisions at different time in the simulation. The best example is within-day replanning due to unexpected traffic conditions.
In fact, the reason for this section on distributed computing is that one would want to combine within-period replanning with parallel computing: within-period replanning is needed for modeling reasons, and parallel computing is needed in order to run large scenarios. It was already said, in Sec. 3.5, that subroutine calls or its remote variants achieve within-period replanning, but because everything is run sequentially, this is slow. Parallel computing, in Sec. 3.6, discussed how to speed up the sequential computation, but did not discuss within-period replanning. This section will discuss how these things could be combined. Two technologies will be discussed:
As for sequential codes, the first technology that comes to mind to enable within-period replanning is to use, from inside a parallel mobility simulation, the ``subroutine call'' technique from Sec. 3.5.2 or its ``remote'' variant from Sec. 3.5.4. This would probably be a pragmatically good path to go; however, the following counter-arguments need to be kept in mind:
[] ![\includegraphics[height=0.3\hsize]{load-bal-repl-fig.eps}](img85.png) []
[]![\includegraphics[height=0.3\hsize]{plans-server-timing-fig.eps}](img86.png)
|
Conceptually, it should be possible to design a simulation package similar to Fig. 1: There could be a parallel mobility simulation in which the physical reality (``embodiment'') of the agents is expressed, and then there could be many independent ``agent brains'' in which the agents, independently from each other, receive stimuli from the mobility simulation, compute strategies, and send them back to the mobility simulation.
For example, once an agent arrives at an activity location, that information is sent to the agent brain-module. That brain-module then decides how long the agent will stay at that activity. It will then, at the right point in time, send information to the mobility simulation that the agent wants to leave the activity location and what its means of transportation are going to be.
Similarly, an agent being stuck in a traffic jam would send that information to the brain-module. The brain-module would compute the consequences of this, and decide if changes to the original plan are necessary. For example, it could decide to take an alternate route, or to adjust the activity schedule. By doing this, many CPUs could be simultaneously involved in agent strategy generation; in the limit, there could be as many strategy generating CPUs as there are agents.
This idea is similar to robot soccer, where teams of robots play soccer against each other. In robot soccer, robots typically have some lower level intelligence on board, such as collision avoidance, but larger scale strategies are computed externally and communicated to the robot via some wireless protocol. The analogy with our simulations is that in our case the ``embodiment'' (where the robots collide etc.) is replaced by the mobility simulation. The difference with robot soccer is that there is no cooperative decision making (at least in the simplest version of MASIM).
Such a distributed approach replaces the load-balancing problem by a ``delay problem'' (Fig. 8(b)): The distributed implementation introduces a delay between the request for a new strategy and the answer by the strategy module; in the mean time, the physical world (represented by the mobility simulation) advances. In consequence, the distributed approach can only be useful if the simulation system can afford such a delay. Fortunately, such a delay is plausible since both humans and route guidance services need some time between recognizing a problem and finding a solution. However, care needs to be taken to implement the model in a meaningful way; for example, there could be a standard delay between request and expected answer, but if the answer takes longer, then the mobility simulation is stopped anyway.
Despite these caveats, we find the idea of autonomous computational agents very attractive, but with current software and hardware tools, it seems out of reach. Even if we could run 1000 independent processes on a single CPU (which seems doubtful), a simulation with 10 millions of agents would still need 10000 CPUs for strategy computations. For the time being, we can only plan to have a few brain-modules per CPU that are each responsible of a large number of agents each.
Given the distributed agent idea, the question becomes which software to use. At this point, there is a lot of talk about this kind of approach, under the name of, say, ``software agents'' or ``peer-to-peer computing'', but there are no established standards and most of today's development in that field are geared by interoperability concerns without much regard about performances.
The main problem, when compared to the remote procedure calls discussed in Sec. 3.5.4, is that for a distributed computing approach one wants to have the modules run simultaneously, not sequentially. A subroutine call, even when remote, has however the property that it waits for the call to return; or alternatively, it does not wait but then there is also no default channel to communicate the results back. One way out is to use threads (Sec. 3.6.3) combined with remote procedure calls, in the following way:
This is the same is in Sec. 3.6.3. In contrast to there,
however, the thread itself would now just be a remote procedure call:
![]()
In this way, the local parallelism that threads offer could be
combined with the interoperability that remote procedure calls offer.
Although this combined threads/RPC approach should work in any modern computer language, at this point, it looks like Java may become one of the emerging basic platforms on which software agents are built. Potential technology such as Jini may help to build this architecture. Jini is essentially an automatic registration mechanism for software agents, built as an application layer on top of different communication mechanisms such as Java RMI, CORBA or XML. The purpose of Microsoft .NET is similar (i.e. self-registering of web services) but it is multi-language, single OS (Windows based), and it favors XML for the communication layer.
Even if Java becomes the emerging standard for software agents, we have a problem of how to couple this to the mobility simulation. Here are several options, with their advantages and disadvantages:
If this option works well, it might be the best solution, since the preferred technology for mobility simulations, because of its closeness to physics simulations, will probably remain C++/MPI, while the preferred technology for agent simulations may be Java.
Tab. 2 summarizes the advantages and disadvantages of the parallel and distributed approaches discussed in this test. Overall, one can maybe say that the approach of distributed software agents, as visualized by Fig. 1, is very promising but also very experimental. Besides the experimental stage in the area of software agents alone, it is unclear which technology is best able to couple the software agents on the strategy level with the physical mobility simulation which uses computational physics techniques.
In the meantime, there will be single-CPU implementations of agent technology. They will help understanding the issues of agent-based computation of travel behavior, but it is unclear if they will be able to simulate large scale scenarios within acceptable computing time.
GRIDS are currently pushed in particular by the high energy physics community, which will very soon produce much more experimental data than the computers at the experimental site can process. Therefore, a world-wide system is implemented, which will distribute both the computational load and the data repositories.
When looking at GRIDS, one has to notice that they are as much a political decision as a technological one. Clearly, it would have been much easier to move all the computers to the experimental site and to construct one system there which would serve the whole world, rather than distributing the whole system. Given current funding systems, it is however impossible to do this, since the economy around the experimental location would be the only economic benefactor.
In consequence, when looking at computational GRIDS to solve computational transportation problems, one first needs to consider if a problem is truly large enough to not run on a single site. Since the answer to this question is probably nearly always ``no'', the primary reason which leads to computational GRIDS in other areas of science does not apply to transportation.
There are however other reasons why such an architecture may pay off in transportation. The foremost reason probably is that all data in the geosciences is derived and maintained locally: Counties have their very detailed but very local databases, regions have data for a larger region but less detailed, etc. In addition, there are vast differences between the quality of data and the implementation in terms of Operating System, database vendor, and database structure.
For a large variety of reasons, it will probably be impossible to ever move all this data into a centralized place. Therefore, it will be necessary to contruct a unified interface around all these different data sources. For example, it should be possible to request U.S. and Swiss census data with the same commands as long as the meaning of the data is the same, and if the meaning is different, there should be clear and transparent conversion standards. The advantage of such a standardized interface would be that codes would become easily transferable from one location to another, facilitating comparison and thus technological progress.
It should be mentioned that there is a project called ``Open framework for Simulation of transport Strategies and Assessment (OSSA)'' (www.grt.be/ossa, accessed 2003). OSSA's aim is to integrate database tools, simulation tools, analysis tools and simulation tools into a single framework that is useful for policy analysis. It is at this point difficult to find out how that project progresses because little documentation exists. In addition, available information indicates that the approach is based on origin-destination matrices rather than on behavioral agents.
Another aspect of ``computation for travel behavior research'' concerns the area of numerical analysis, e.g. non-linear optimization, matrix inversion, etc. Besides as solutions to route assignment, such approaches are for example used for OD matrix corrections from traffic counts, for model calibrations, for the estimation of random utility models, etc. These approaches, as important as they are, were simply beyond the scope of this paper. They would necessitate a separate review paper.
Before coming to an end, let us briefly touch upon the subject of visualization. It is by now probably clear to many researchers that communication of scientific and technical results to people outside the field of transportation research is easiest done by the means of visualization. It is therefore encouraging to know that we are close to solutions which will bring certain aspects of virtual reality to a laptop. This will make it possible to bring both scenario results and the means to look at them to any place of the world where they are needed. We see this as a very positive outcome since it is, in our opinion, the citizen who needs to decide about the transportation infrastructure.
![\begin{table}\vspace{0.5em}\hrule\vspace{1em}
\centering
\begin{minipage}[c]{\hs...
... & PCs, Myrinet
\\ \hline
\end{tabularx}\end{minipage}\medskip\hrule
\end{table}](img84.png)